Hi friends
I have been using my project, the Carina Sailboat as a “red line” along which I get in touch with a diverse spectrum of techniques. Nearly a decade ago I has discussions with friends about why electronics is not being used or accepted by naval modelists as one additional technology in our hobby. Lets make it clear! I am not talking about using commercially offered electronics as can be found in R/C transmitters and receivers, servos, motors and their controllers. Neither am I talking about the thousand of circuits that can be found in the Internet of electronics circuits that replace functionality offered by commercial products and that can be build applying the instructions made available with them. Also the latter to my believe is a first step into the right direction!
I am talking about seeing electronics not as a black box or as a “kit”, but as an additional technology that can be used to enrich our hobby. I like to describe this analog with the way we get to build our model ships! There are modell ready to fly or navigate or drive depending of which area of modelism you are interested in! Focus is to enable you to navigate out of the box! A perfectly legitimate and respectable position! On the other extreme you have those that after long research make their own plans and build a model based on the result of those research efforts. Same is true for electronics. Most have as a focus of their efforts navigating a sailboat, i.e., to compete in regattas and so the electronics are the means by which they can control their sailboats form the shore of a pond. This way the electronics are a black box, perfectly adequate for their objectives!
Mainly in motor boat models you find many aficionados that have the objective to implement as many functions as possible in their models and which either have deep pockets or set their expending priorities in such a way that they acquire often commercially offered often expensive electronics. Some of those aficionados extend into using hardware that is offered in the Internet to extend the capabilities of their basic commercial sourced electronic components. So, about a decade ago a friend of mine decided to develop a tutorial that enabled a participant to combine “modules” of electronic functionality from the electronic circuit drawing to their final electronic device that fitted their objectives. Was kind of analogous to the “lego” parts! Out of a reduced set of functions a hobbyist could create his own electronic design to implement something he had as an objective. This system, based on ATmel AVR microcontrollers, same can be achieved with the so called “PIC” controllers is lately been replaced a bit using Arduino boards and shields, which allow to save the effort of building your own electronic boards and combine performance, versatility and low cost to achieve a dramatically improved system, but still allowing the flexibility of a “Lego” system look alike flexibility.
Having spend so many years along this path I decided some time ago to implement a sheet system to control the sails of my J-Class kind of sailboat that would allow me to change the length of the sheet by 8400 mm or approx. 330 inches:

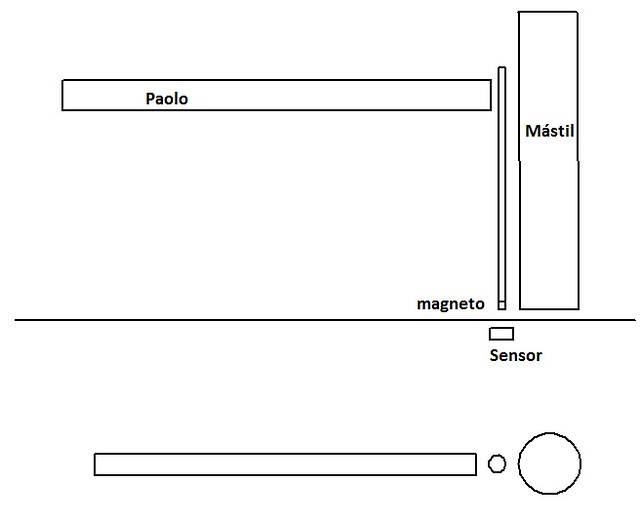
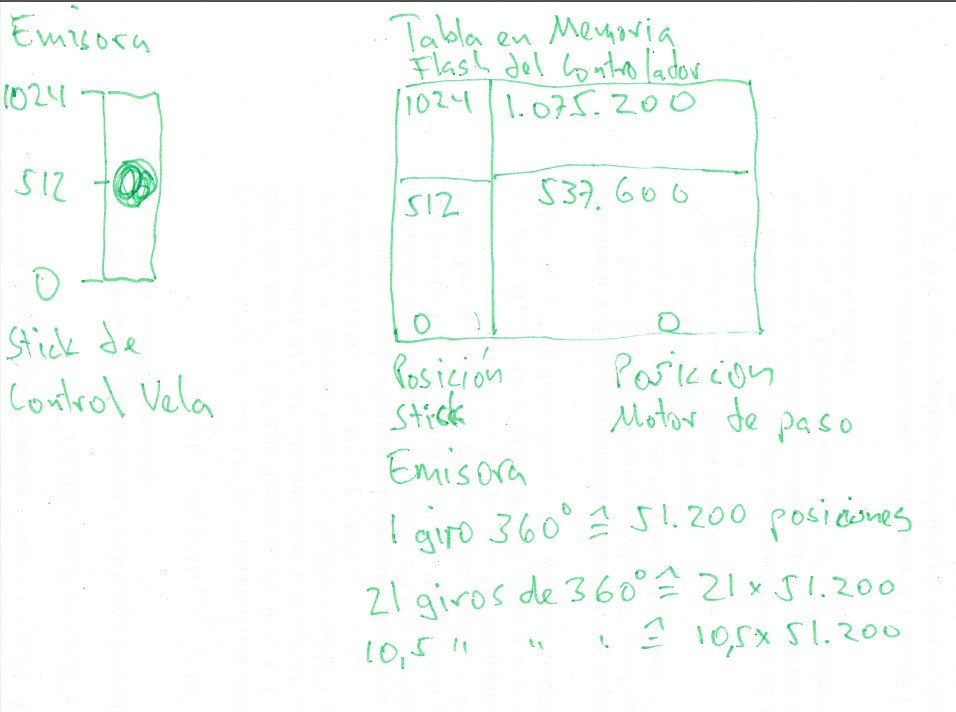
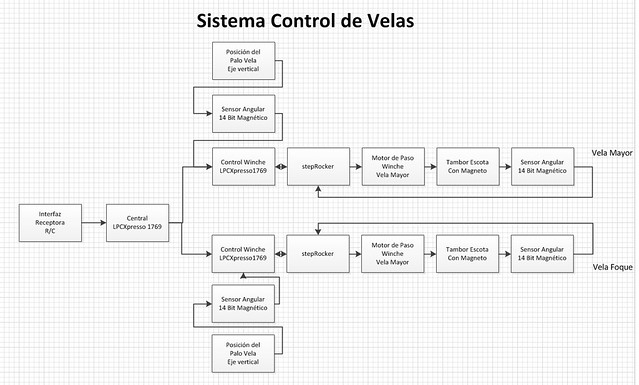
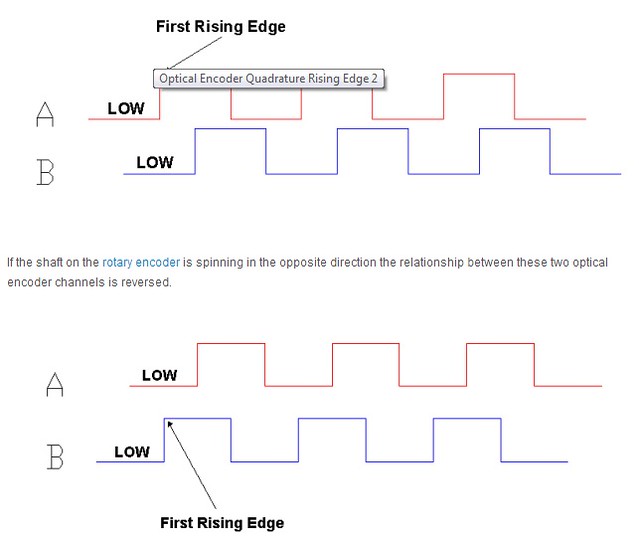
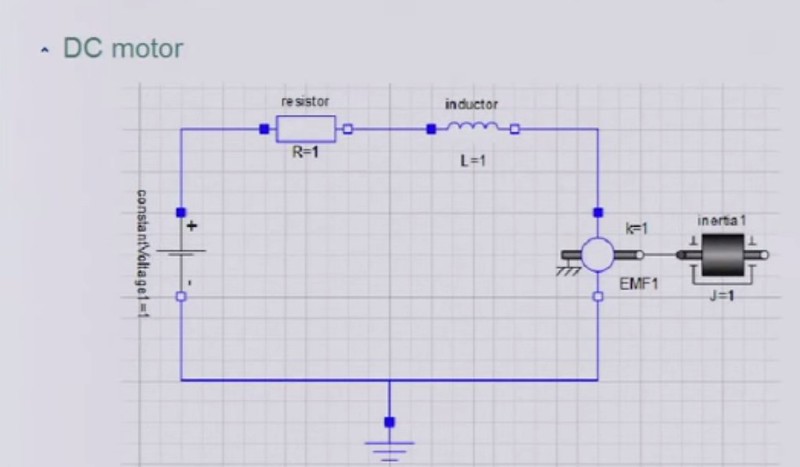
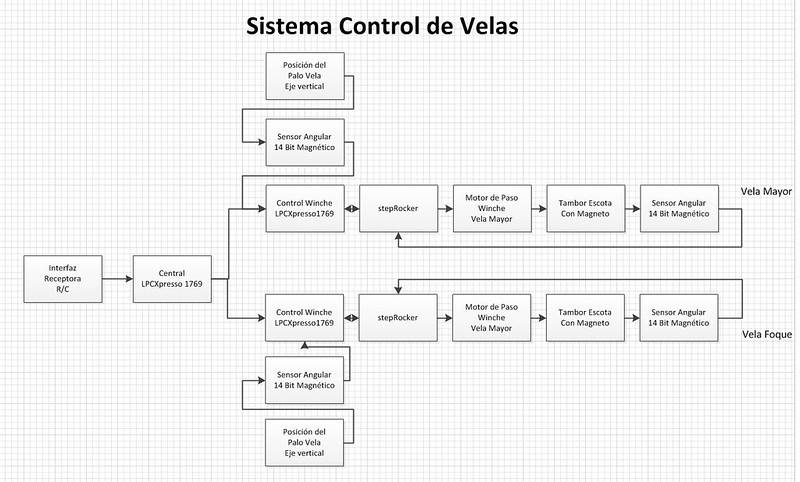
I decided to implement this system using a stepper motor to turn a drum with the sheet and have software running on a controller board to make only so much sheet available at any moment in time as required due to the position of the boom of the sail. So I track the position of the boom by using a magnetic angular sensor to report with at least 1024 positions for the possible 90° angle the boom can have between the center axis of the hull and the boom to either side. The stepper motor, with 51.200 positions per 360° full turn would choose a position that delivered the amount of sheet just required by the boom. The position of the control stick at the transmitter is equivalent to a certain angular position of the boom and so the stepper motor would not allowed to make more sheet available as required to limit the boom angle defined by the control stick position!
As often the details is where the challenge is found! So many very helpful sailboat aficionados reported their experiences and their opinions to my system, some even stating that my system could not work, due to the problems arising from the scale between an original J-Class sailboat and my model. Also reflecting of my system during my extend walks with our dog through the country side made me aware of challenges that would deeply impact the energy efficiency of my sheet control system and details about the operation of the system under certain conditions. So one of this continuous researches and investigations in the Internet made me aware of the technology called “System Modelling”. I was able to investigate further into it by studying the capabilities and limitations of a software combo called “Matlab and Simulink” and much later of another product called “Maple and Maplesim”. Finally I learned that also the good old software tool form Wolfram research, called Mathematica and a new product called “System Modeller”, offered similar capabilities to apply design by modelling techniques to my sheet control system with the goal to simulate and optimize the design and even to test against possible threats to its ability to work at all given by diverse model ship aficionados. So I started to reflect about my sheet control system with the new possibilities given by the technology of design by modelling and to try to find out what skills I would require to apply this methodology to the design of my sheet control system.
Lets summarize this the following way:
-
My mathematics skills, frozen about 35 years ago when I studied mechanical engineering made it obvious that I would have to refresh and expand my knowledge, as all techniques related to this objective are strongly driven by applied mathematics. So no way i could use this technology without working on my skillset!
-
Soon, after studying in detail what was required to get those skills by analyzing which courses would give me the required knowledge I found out, that today in the Internet you can choose from a relatively wide selection of offers, free courses such that the style of the teacher best applied to my way of learning. OpenCourseWare, a free offering of the MIT in Boston offers video recordings of lectures of the complete courses, videos of sessions were examples were solved for students as part of those courses, the complete written versions of the video recorded lectures, exercises and results and old exams that could be done under the same conditions as they would take place at the university. This way of learning is superior to that being in presence inscribed at a university and paying the awful rates that MIT i.e. demands from their students. Yo know what? I am having fun learning in this courses with no stress due to time, being able to repeat any part of a video recorded lecture until I grasp the content, being able in parallel to use google and wikipedia to dig in depth into any term, into information about any person mentioned or getting additional help to capture a topic. Also the recommended and suggested readings could be found in many cases for free as downloadable PDF files or as inexpensive e-books or kindle books.
-
As universities of excellent quality in Germany are for free, I plan to collect the credits from the courses after I finish learning them in self study courses from OpenCourseWare or from german universities! This will also allow me to get additional information and study courses from after the bachelor degree! As mathematics are the core enabling skill set and tool set used in nearly all courses relevant to my objective to design by modelling using probably the software Mathematica and System Modeller and the description language Modelica I am using Mathematica to apply the mathematics I am learning to describe and solve the homework tasks. May be, if God or the devil do not call me too early from earth or as long as my brain is able to deal with the challenges of learning and applying that knowledge I might even get those degrees!
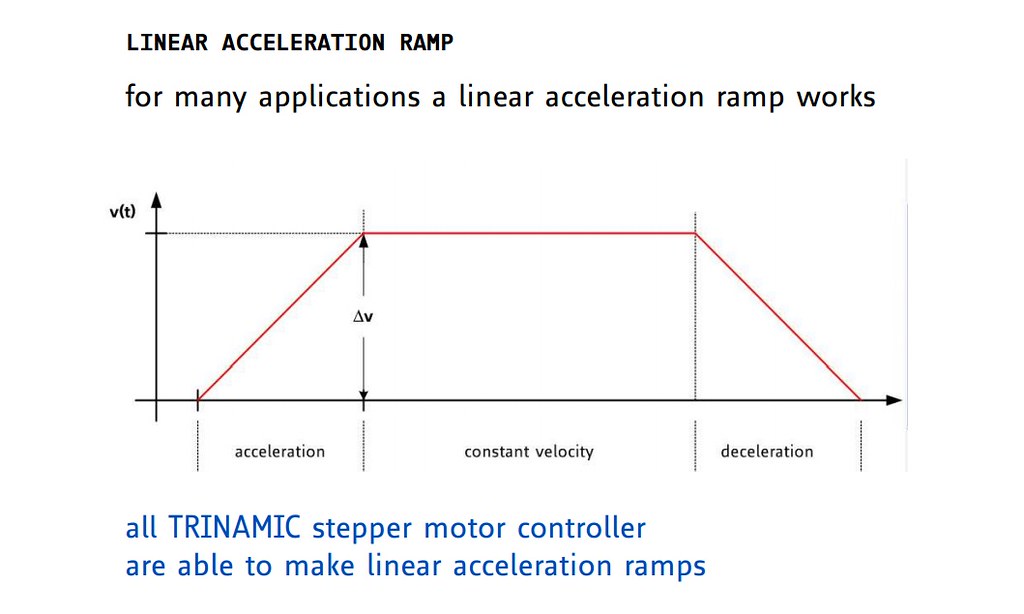
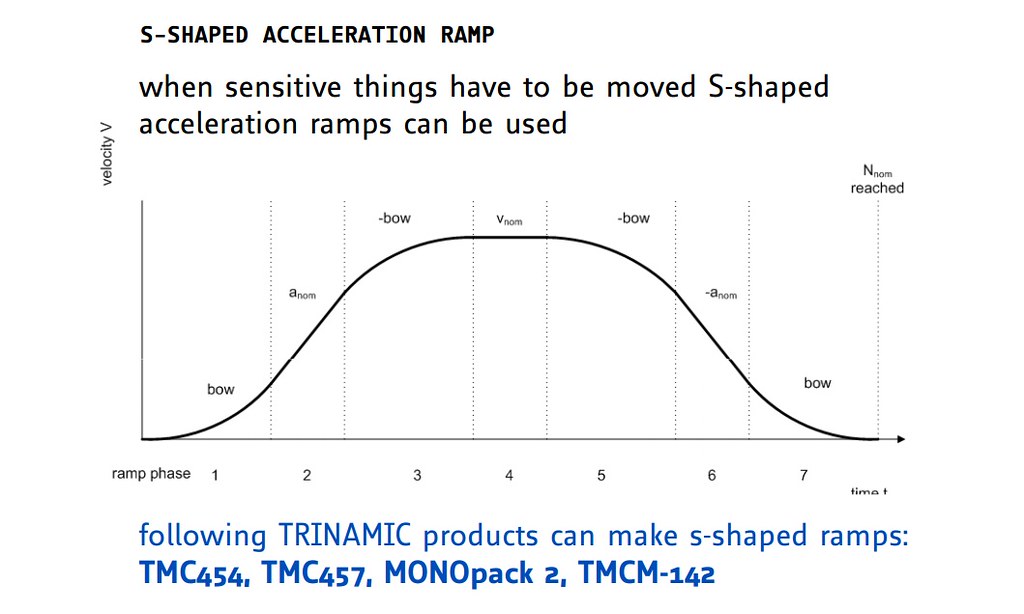
I have opened this thread and reported about what I have been writing here to share with you what might be considered to include 21st century science and technologies into our hobby. The opportunities rising from those developments in science and technology can have and have for me an immediate impact on experiments I do closely related to my project of a sailboat with this special sheet control system. I have not written about those practical and fascinating experiments and studies I have been doing and I am preparing to do, because already the concept about to include technologies and tools of the 21st. century in our hobby are hard to digest! Being very few that build sailboat models based on the results of extensive research, I expect it to be even far less those that my feel attracted by this new possibilities! If interest exists I would like to present the results so far about operating stepper motors, about the impact of most advanced parameters that can be controlled and played with in the operation of a stepper motor. About why a stepper motor is an interesting option to implement a winch using it and why my sheet control system aöllows to simplify extremely the mechanics involved in a sheet control system different from what is being used today.
But also research activities and a yearly competition about autonomous sailing robots about which I am working on writing some articles that reflect those contributions and the interesting opportunities those technologies presented in papers offer to be applied to our normal sailboats. The world of model sailboats has a lot to gain from 21st. century developments!